声呐综合处理系统
前言
非常荣幸能够从2021年9月参与,推动整个项目的从零到2022年11月的最终交付。在这个过程中,我们面临了许多艰巨的挑战,不断迭代和完善各种新的需求,最终客户满意并顺利完成交付。
所有的工作可以大致分为三部分,我和另外两位同门用gitee私仓协作开发,我做的第一部分。
- 多个协议的前视、侧扫格式数据解析、GUI架构设计、瀑布流实现、增删目标、在线解析
- 拼接部分:负责声呐图像拼接、航迹线绘制、集成到Qt
- 检测部分:负责目标检测算法改进、检测目标存储、集成到Qt
项目简介
本项目实现了声呐文件解析、瀑布流展示、检测目标、数据库存储、增删目标、图像拼接、航轨线展示等功能。
功能:
- 前视、侧扫版多种格式支持
- 文件解析、加载进度条
- 侧扫声呐实现瀑布流效果
- AI算法检测,将检测到的目标信息存入数据库
- 解析完成后可查看大图,放大、缩小、整个文件
- 漏检目标标注,和误检目标删除
- 支持多文件批量操作
- 支持多种AI算法模型选择
- 支持模型参数设置,比如PR、IOC
- 拼接图像,放大、缩小、平移
- 拼接地图大小自动扩充
- 航轨线显示
- 拼接地图经纬度跳转
- 独立的前视、侧扫开关,优化加载速度
- 大文件切割与存储
- 在线解析
- 窗口大小自适应
接手
刚参与项目的时,了解到这个项目在师兄的努力下,已经使用c#搭建了UI个雏形,但缺少核心处理逻辑。和客户的交流后,了解到项目需要使用CV算法。
目前对于跨平台选择方面有些问题:
- 继续使用C#开发,沿用师兄的UI雏形,需要解决跨平台问题
- 使用Qt开发,这将能直接使用师兄的C++版本数据解析程序。
- 使用Pyqt开发,这将能直接调用AI算法,不存在跨语言调用问题。
考虑后续需要接入算法,我提议采用PyQt搭建整个UI。确定好开发方案后,首先就是解析声呐二进制数据实现瀑布流的效果。
二进制数据解析
声呐数据的存储格式一直没有统一标准,不同厂家生成的声呐具有不同的协议格式。工业级的声呐都会有极其严格的协议标准,来保证声呐数据的准确性。帧头通常会有几十个数记录经纬度、水文信息、传感器等数据,帧体记录当前帧的声学数据。
要解析这些二进制数据,首先的知道声呐的存储协议。根据协议分析二进制数据,整个协议相当于由C++的结构体堆砌而成。在python中使用struct模块处理二进制数据,他能够类似C++结构体一样处理二进制数据库。解析的过程也是相当痛苦,因为有的声呐格式并没有协议文档,只有C++解析demo,需要先根据C++程序分解出哪里是校检位?,某段二进制对应的结构体是什么?有协议没demo的则需要根据协议自己构造结构体。
解析完成后,再对图像降噪滤波、灰度矫正、斜距矫正和速度矫正后则进行瀑布流展示。对于多波束的声呐,还需要对声呐数据进行融合修正。这些矫正都有固定的算法来实现,这里不详细展开。其中解析过程中出现了很多问题,比如
- 二进制内存对齐问题
- 二进制拼接内存泄漏问题
- 图像处理速度慢问题
PyQt架构设计
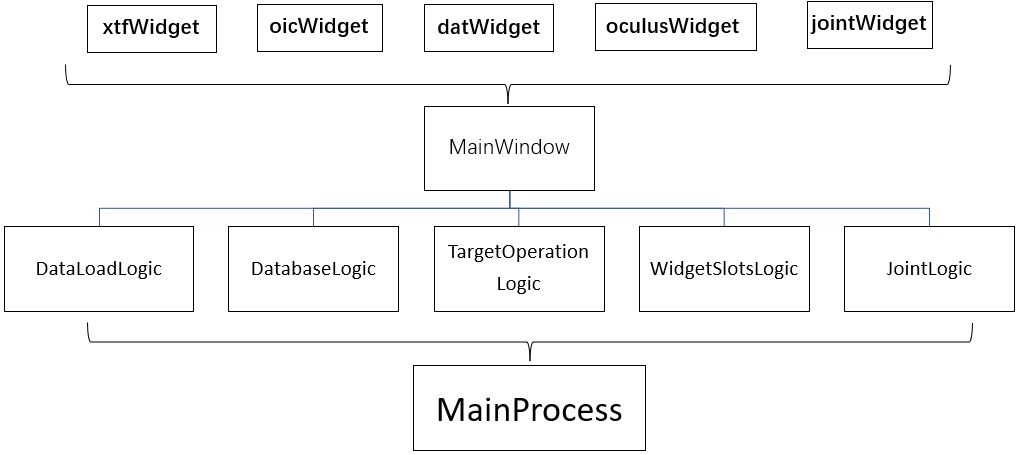
之前一段时间都是采用UI与login不分离的写法,随着功能越来越多,导致程序不好维护。我通过github参考了好几个PyQt开源项目,总结了一套我们能使用的UI与logic分离的模式。在本项目中将不同功能的的widget窗口使用QtDesigner单独绘制。再使用MainWindow集成到一起,让所有的Logic继承MainWindow;最后用MainProcess继承多个Logic。
这样的做优势有以下几点:
- 实现UI与Logic分离,提高了程序的可维护性;
- Widget使用QtDesigner绘制,降低了UI开发难度,节省了开发时间;
- 将功能模块化,减少代码冲突的,提高多人开发效率;
- 每个子模块都能单独运行,提升Debug效率
有时候程序直接崩了,并没有指定报错的具体位置的时候,这种Debug方式非常有效。
瀑布流
首先是对二进制文件预处理即先解析出ping(帧)的数量和位置,其次具体解析每一ping(帧)的数据,与前面解析好的数据拼接后,最后渲染到UI上。这不是等待彻底解析完成后才加载,而是同时进行的。瀑布流解析完成后,则可以进行滚轮自由滚动。需要注意的目标选框的实现方式、文件的自由滚动实现方式计算都比较繁琐。
目标框选实现原理
最开始的目标框选比较简单:
使用一张很大的三维数组来存放整张图像,每解析完成一ping(帧)就赋值到指定位置,如果检测到目标就画完框后对整张图像进行覆盖。再取出要渲染的部分直接渲染。
那么此时就有两个个问题:
- 如果出现误检需要删除目标就无法实现?
- 如果此时切换窗口大小,则目标选框,一样会跟着伸缩,选框上的标注也会形变
要解决这样问题则必须画框和瀑布图完全分开。
改进后的方式是:
同样是使用一张很大的三维数组来存放整张图像,每解析完成一ping(帧)就赋值到指定位置。每检测到目标则缓存目标的具体位置。根据要渲染的区域,再绘制目标标注框,需要考虑好滚轮的位置、渲染窗口的大小、图片宽度缩放、目标大小比例转换等因素,这里的计算稍显麻烦。
文件的自由滚动实现原理
滚动时,需要根据解析好的大图,计算好目标位置,再一起渲染到UI对应的窗口上,其中需要考虑的因素有
- 当显示内容不足当前窗口高度时,则需要拼接对应大小的黑色区域
- 需要计算好当前滚动位置与滚动条位置的像素关系
- 若是多个文件滚动,则需要考虑前面滚动所有的文件的高度,和当前滚动位置的关系
- 多文件滚动时,框选目标的计算方式也需要考虑前面滚动的所有文件的高度
增删目标
因为AI算法检测容易出现错检、漏检,有时候需要人工标注,进行增删目标,这些操作都需要联动数据库一起增删。
增加目标:首先需要将鼠标在图像渲染窗口中变成’+’,再将x、y轴添加白色虚线。按下鼠标则需要添加对应的回调,绘制矩形框,松开后,则输入目标的ID,确定后,则将目标位置计算出来,添加到数据库,重载窗口。其中涉及到很多问题:
- 绘制时,如何实时变更选框跟随鼠标拖动变大?检测鼠标按下事件、拖动事件,根据鼠标位置计算框的位置,再渲染;
- 绘制后,怎么计算出具体的位置?根据滚轮滑条的位置、计算出当前操作的声呐文件,在计算出是哪一ping(帧);
- 绘制后如何确定大小?根据当前窗口宽度和原始图像的宽度,做比例换算得出;
- 非法绘制?绘制到当前窗口区域外、两个文件的中间,那就需要提前做条件判断。
删除目标:删除目标,则需要添加鼠标移动事件,需要实时计算当前鼠标所在的区域是否有目标存在,如果有则鼠标呈”手型”,点击后,在数据库删除对应目标,并重载窗口。
在线解析
离线解析的方式毕竟实用性有限,本小节介绍的工作是实现声呐数据的在线解析。我调试的这款声呐设备支持网络数据输出,但是必须得用人家的SDK,大致思路是使用厂家SDK驱动声呐,拿到声呐实时数据。看似简单的工作,其实也充满了挑战。我刚分配到这个任务也很忐忑,因为实验室内没人做过声呐数据的在线解析,其中遇到的问题也能自己解决,经过一星期看文档、调试设备和代码后,开辟出一套可行的方案。
可以将这个工作拆解:
- 看文档学习SDK的正确使用方式
SDK文档是C++版本,Python版本的SDK没有对应文档,后面分析发现,使用ctypes对C++的动态链接库调用,每看一个API就需要去python的SDK程序看一遍封装流程,才能正确使用SDK
- 确定SDK的正确的工作环境下能否正常工作
这个过程一定要弄明白SDK是X86架构还是ARM,32bit还是64bit,Linux还是window。
- 确定声呐设备能否正常工作
这个过程也出现过玄学问题,声呐的连接时而好时而坏,困扰好几天,通过控制变量法最终确定是,路由器转发后的那条网线的抗干扰能力不行。
- 测试SDK在网络环境下是否正确接收到声呐数据。
接收到的是一个C++数据地址,python并不能直接访问这个地址,而要使用ctypes.string_at(dir,length)解析指定地址的数据
- 将会用到的功能封装成对象
经过上面的步骤其实问题已经解决了,但是需要部署在ARM64内核的Linux系统上。由于SDK只支持ARM32和X86内核的Linux上,所以最终使用X86的电脑做TCP转发来解决。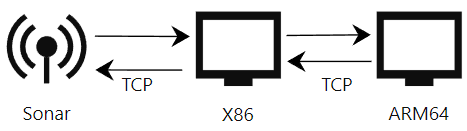
在X86电脑和ARM64电脑上使用Socket将常用命令封装起来,X86作服务端,ARM64作客户端,客户端向服务端发送初始化、设置量程、读取图像等命令。服务端解析后,再使用SDK发送给声呐,并响应给客户端。在这个的过程中使用了简单数据校检,try catch,提高系统稳定性
这个过程中出现问题有:C++内存数据读取问题、TCP粘包问题等
总结
这个项目断断续续做了一年多,真正开发集中在前几个月,很大一部分时间都是后期的bug修复。本项目中大部分功能是按照客户需求结合自己想法去实现。比如瀑布流、目标选框的分离、增删目标的位置计算等,这些功能都需要自己去造轮子。这些问题都需要自己去做需求拆分,一步步调试,完成基本功能,再迭代优化。
有任何疑问和想法,欢迎在评论区与我交流。
 微信
微信 支付宝
支付宝